
V2X(Vehicle-to-Everything) 기술을 활용하는 여러 가지 서비스 중에서도 V2X 통신을 통해 차량 위치를 파악하는 'V2X 포지셔닝'은 가장 중요한 기술입니다. 차량의 현재 정확한 위치를 알고 있음을 전제로 하는 서비스가 많기 때문입니다. 위치를 모른다면 위치 기반 서비스는 성립하지 않으니까요.
V2X 포지셔닝은 기본적으로 위성 항법 시스템 'GNSS(Global Navigation Satellite System)'를 기반으로 위치를 추정합니다. 하지만 GNSS 기반 포지셔닝은 기술의 특성상 완벽히 정확한 위치를 제공하진 못하니 어느 정도의 오차를 가질 수밖에 없습니다.
그러한 오차 때문에 차량의 위치를 '몇 퍼센트의 정확도로 몇 미터 안에 위치하고 있다'는 식으로 표기합니다. 예를 들어, 오늘날 차량이나 스마트폰 등에 탑재되는 표준 GNSS 수신기는 '58%의 신뢰 수준에서 약 1.5m의 위치 정밀도를 가진다'라고 되어 있습니다. 이를 달리 말해 보면 오차가 1.5m보다도 큰 경우가 최대 32%나 된다는 뜻이기도 합니다.
하지만 이러한 정확도 방식은 실시간성과 정확성이 보다 치명적으로 작용하는 시스템에는 적용할 수 없습니다. 실제 위치를 정확히 알고 있는 고정된 점을 기준으로 여러 번의 측정을 통해 도출하는 정확도이기 때문에, 실제 위치보다 GNSS 수신기의 성능이 더 크게 작용하는 값이라 할 수 있죠. 그런데 주행 중인 차량 입장에서는 실시간으로 변동되는 정확도가 필수입니다.
따라서 현재 통용되는 위치 정확도 표기 방식과는 아주 다른 표기 방식이 필요합니다.
미터 레벨 정확도와 차선 레벨 정확도
미국 자동차 공학회 SAE(Society of Automotive Engineers)가 정리한 'SAE J2945/7' 문서는 'V2X 정밀 포지셔닝'에 대한 내용을 담고 있습니다. V2X 정밀 포지셔닝이란 차선 레벨 포지셔닝에 해당합니다.
차량의 포지셔닝은 정확도에 따라 두 가지로 나뉘는데, '미터 레벨 정확도'와 '차선 레벨 정확도'입니다. 미터 레벨 정확도는 GNSS의 정확도 수준에 부합하는 미터 단위의 정확도를 의미합니다. 차선 레벨의 정확도는 도로에서 차량이 현재 몇 차선에 있는지까지도 특정할 수 있는 정확도를 의미합니다.
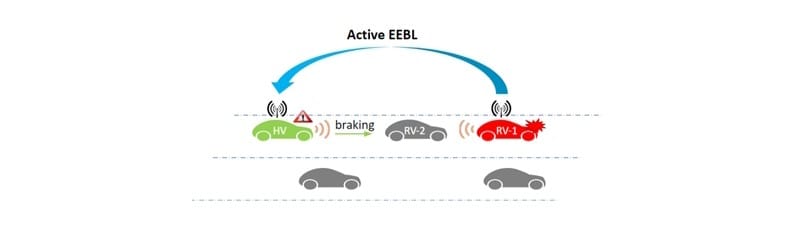
미터 레벨 정확도는 일반적으로 도난 차량 회수 등의 그리 정밀하지 않은 일에는 활용 가능하지만, 차선 수준의 절대적인 위치 구분이 필요한 애플리케이션에 적용하기에는 충분하지 않습니다. 도난 차량의 현재 위치를 파악해 회수하기 위한 서비스는 대략적인 위치만 특정해도 되기 때문에 차선 레벨의 정확도까지는 필요하지 않습니다. 하지만 주행 중에 바로 앞에 있는 차량을 GPS 위치 정보로 인지해 충돌 회피 경고를 보내기 위해서는 차선 레벨 정확도가 필요합니다.
이번 포스팅에서는 SAE J2945/7에서 다루고 있는 대표적 내용 몇 가지를 살펴보려 합니다. SAE J2945/7는 차선 레벨 포지셔닝이 요구되는 애플리케이션, 그리고 차선 레벨 포지셔닝의 여러 요구사항을 제시하고, 기존 표준 내용의 개선 필요성을 주장하는 문서입니다.
V2X 정밀 포지셔닝, SAE J2945/7
우선 SAE J2945/7에서는 정밀 포지셔닝을 활용하는 여러 애플리케이션을 정의합니다. 그리고 앞서 언급했던 기존 GNSS 경우와는 다른 정확도 표기 방식의 대안 또한 제시합니다.
현재의 기준인 SAE J2945/, SAE J3224 등의 표준은 위치 정확도를 나타내기 위해 어떠한 값을 사용해야 하는지에 대해 자세히 다루고 있지 않습니다. 따라서 확실한 구현을 위해서는 해당 표준들에 대한 개선이 필요한데, SAE J2945/7는 위치 정확도를 표기하기 위한 새 기준을 제시합니다. 그 기준에 대한 자세한 값을 명시하진 않지만, 중요한 기준이 무엇인지에 대한 방향성은 제시하고 있습니다.
차량의 입장에서는 실시간으로 실제 위치를 파악하는 것이 불가능하기 때문에 '정확도'라는 표현보다 '신뢰도'라는 표현을 사용하자고 제안하며, 그러한 신뢰도를 표현하기 위한 여러 기준들을 제시합니다.
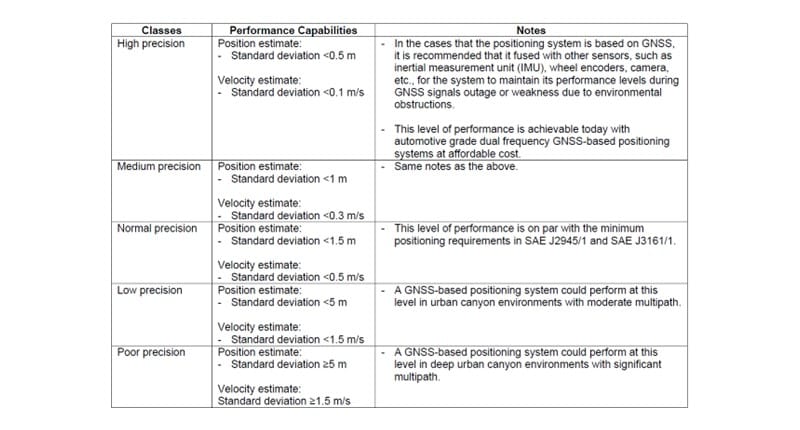
또한 그렇게 결정된 포지셔닝 신뢰도를 기준으로 포지셔닝 시스템 성능을 아래의 5가지 등급으로 분류하자고 주장합니다. 차량 한 대는 수십 대의 주변 차량으로부터 100ms 주기로 메시지를 수신하므로, 이를 등급에 따라 분류하여 메시지를 신속하게 필터링해야 한다는 주장입니다.
SAE J2945/7는 현재의 표준들의 문제점도 여럿 지적합니다. 특히 모든 표준에 공통된 정의가 필요하다는 사실을 강조하고 있습니다.
예를 들어, 'Heading versus Course angle(헤딩각 대 코스각)'에 대한 현재 표준의 정의에 오류가 있다고 지적합니다. 현재 모든 SAE V2X 표준들은 SAE J2735의 방향에 대한 정의를 참조하고 있는데, SAE J2735에서는 헤딩각과 코스각에 대한 정확한 정의가 부실하기 때문입니다. SAE J2735는 방향에 대한 값인 헤딩각과 코스각을 동일시하고 있지만, 두 값은 애초에 다른 값이므로 두 값을 달리 취급해야 한다고 강조합니다.
위 그림에서 '차체가 바라보는 방향'이 헤딩각이고, '차량이 움직이고자 하는 방향'이 코스각인데, 서로 다른 그 둘을 함께 혼용하여 사용하는 것은 큰 잘못이라고 지적합니다.
예를 들어, SAE J2735에서는 'DE_Heading'이라는 데이터 요소 DE(Data Element)를 정의하지만, 실제로 이 DE가 항상 헤딩각을 나타내지는 않으며, 또한 SAE J2945/1에서는 'DE_Heading'이 코스각을 의미하고 있어서 혼란스러우므로, 여러 표준들의 정의를 통일해야 한다는 주장입니다.
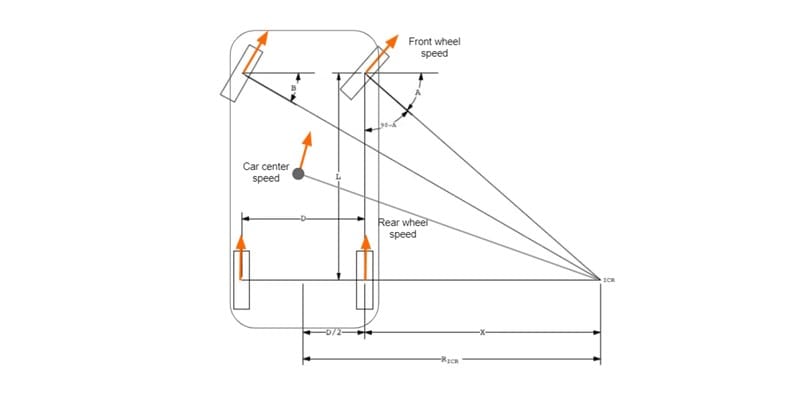
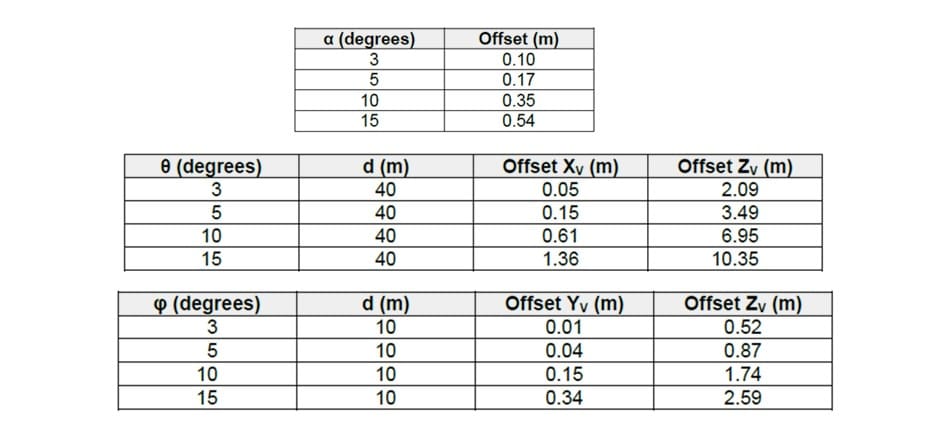
차량을 단지 하나의 점으로만 표기했을 때는 그러한 오차가 거의 무의미하기도 하지만, 차량의 크기가 클수록 오차가 유의미해지기 때문에, 그러한 문제의 심각성을 지적하며 그에 따른 오차 보정을 제시하기도 합니다.
그리고 차량의 좌표계와 기준점에 대하여, 차량의 기준점을 'rear axle(뒷차축)'의 중심점으로 정하는 것이 합리적이며, 차량 기반 좌표계를 '중력 벡터'와 '도로 벡터'에 기준한 두 가지를 동시에 사용하자는 등의 여러 주장을 담고 있습니다.
그 외에도 SAE J2945/7는 표준에서 고정값으로 가정하는 특정 변수들을 실시간으로 변동되는 값으로 수정해야 한다는 등, 여러 개선점들을 제시합니다. 이를테면 GNSS는 재밍(Jamming) 및 스푸핑(Spoofing) 공격에 매우 취약하고 ODD가 제한적이므로 초광대역 UWB(Ultra-WideBand)와 사이드링크(Sidelink), 5G NR(New Radio) 등을 활용하여 위치 보정을 해야 한다는 등, 기존 표준에 대한 여러 개선점을 제안합니다. 충분한 시간을 두고 깊이 살펴볼 만한 내용입니다.
거듭 강조해 V2X를 활용하는 여러 서비스 중에 가장 중요한 서비스는 'V2X 포지셔닝'이 될 것이므로 , 이에 대해 다양한 관점에서 정의하고 있는 SAE J2945/7를 살펴보시면 V2X 기술 활용 방법에 대한 인사이트에 도움이 될 것 같습니다.
-아우토크립트 기술기획팀 송호승 연구원
